
工業機器人是一種裝備有記憶裝置和末端執行裝置的、能夠完成各種移動或工藝來代替人類勞動的通用機器。通常在生產中能代替工人做某些單調、頻繁和重複的長時間作業,或是危險、惡劣環境下的作業。它能夠提升生產的效率和產品的質量,是企業補充和替代勞動力的有效方案。
目前工業機器人發展特點是高速、精確、機身機構緊湊、多自由度和提高剛性,重點領域還要求重載或響應速度快。例如汽車整車生產的電焊機器人負載大部分在150-300Kg間,而電子領域的裝配機器人則需要快速的響應流水線上的配件。
減 速器在機械傳動領域是連接動力源和執行機構之間的中間裝置,通常它把電動機、內燃機等高速運轉的動力通過輸入軸上的小齒輪齧合輸出軸上的大齒輪來達到減速 的目的,並傳遞更大的轉矩。目前成熟並標準化的減速器有:圓柱齒輪減速器、渦輪減速器、行星減速器、行星齒輪減速器、RV減速器、擺線針輪減速器和諧波減速器。80-90年代以來,在產業如航空航天、機器人和醫療器械等發展的需求下,需要結構簡單緊湊、傳遞功率大、噪聲低、傳動平穩的高性能精密減速器,其中RV減速器和諧波減速器是精密減速器中重要的兩種減速器。

精密減速器應用領域
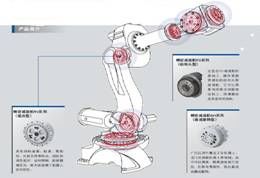
六軸工業機器人中精密減速器位置分布
RV(Rot-Vector)減速器
RV減速器是在擺線針輪傳動基礎上發展起來的,具有二級減速和中心圓盤支承結構。自1986年投入市場以來,因其傳動比大、傳動效率高、運動精度高、回差小、低振動、剛性大和高可靠性等 點是機器人的“禦用”減速器。
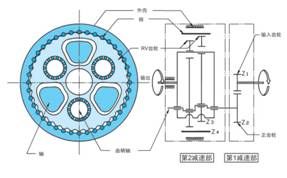
Nabotesco(帝人)RV係列減速器結構圖

Nabotesco(帝人)RV係列減速器
諧波減速器
諧波減速器由三部分組成:諧波發生器、柔性論和剛輪,其工作原理是由諧波發生器使柔輪產生可控的彈性變形,靠柔輪與剛輪齧合來傳遞動力,並達到減速的目的; 按照波發生器的不同有凸輪式、滾輪式和偏心盤式。諧波減速器傳動比大、外形輪廓小、零件數目少且傳動效率高。單機傳動比可達到50-4000,而傳動效率 高達92%-96%。
HarmonicaDrive產品結構示意圖

HarmonicaDriveCSF-LW係列產品
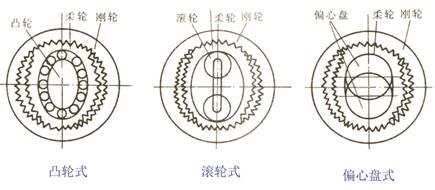
三種常見的諧波減速器類型

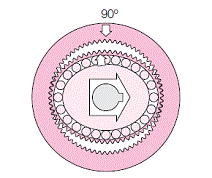
諧波傳動齧合示意圖

普通齒輪傳動齧合示意圖
行星減速器
行星顧名思義行星減速器就是有三個行星輪圍繞一個太陽輪旋轉的減速器。行星減速器體積小、重量輕,承載能力高,使用壽命長、運轉平穩,噪聲低。具有功率分 流、多齒齧合獨用的特性;是一種用途廣泛的工業產品,其性能可與其它軍品級行星減速器產品相媲美,卻有著工業級產品的價格,被應用於廣泛的工業場合。
精密減速器在工業機器人上的作用
工業機器人的動力源一般為交流伺服電機,因為由脈衝信號驅動,其伺服電機本身就可以實現調速,為什麼工業機器人還需要減速器呢?工業機器人通常執行重複的動 作,以完成相同的工序;為保證工業機器人在生產中能夠可靠地完成工序任務,並確保工藝質量,對工業機器人的定位精度和重複定位精度要求很高。因此,提高和 確保工業機器人的精度就需要采用RV減速器或諧波減速器。精密減速器在工業機器人中的另一作用是傳遞更大的扭矩。當負載較大時,一味提高伺服電機的功率是 很不劃算的,可以在適宜的速度範圍內通過減速器來提高輸出扭矩。此外,伺服電機在低頻運轉下容易發熱和出現低頻振動,對於長時間和周期性工作的工業機器人 這都不利於確保其精確、可靠地運行。
精密減速器的存在使伺服電機在一個合適的速度下運轉,並精確地將轉速降到工業機器人各部 位需要的速度,提高機械體剛性的同時輸出更大的力矩。與通用減速器相比,機器人關節減速器要求具有傳動鏈短、體積小、功率大、質量輕和易於控製等特點。大 量應用在關節型機器人上的減速器主要有兩類:RV減速器和諧波減速器。
相比於諧波減速器,RV減速器具有更高的剛度和回轉精度。因此在關節型機器人中,一般將RV減速器放置在機座、大臂、肩部等重負載的位置;而將諧波減速器放置在小臂、腕部或手部;行星減速器一般用在直角坐標機器人上。
減速機的市場現狀
目前應用於機器人領域的減速機主要有兩種,一種是RV減速器,另一種是諧波減速器。在關節型機器人中,由於RV減速器具有更高的剛度和回轉精度,一般將RV 減速器放置在機座、大臂、肩部等重負載的位置,而將諧波減速器放置在小臂、腕部或手部。對於高精度機器人減速器,日本具備絕對 勢,目前全球機器人行 業75%的精密減速機被日本的Nabtesco和HarmonicDrive兩家壟斷(業界俗稱RV減速機和諧波減速機),包括ABB、FANUC、 KUKA等 主流機器人廠商的減速器均由上述兩家公司提供。其中HarmonicDrive在工業機器人關節領域擁有15%的市場占有率。


